귀퉁이 서재
OpenCV - 25. 이미지 매칭 (평균 해시 매칭, 템플릿 매칭) 본문

이번 포스팅에서는 이미지 매칭에 대해 알아보겠습니다. 이번 포스팅 역시 '파이썬으로 만드는 OpenCV 프로젝트(이세우 저)'를 정리한 것임을 밝힙니다.
코드: github.com/BaekKyunShin/OpenCV_Project_Python/tree/master/08.match_track
이미지 매칭(Image Matching)
이미지 매칭이란 서로 다른 두 이미지를 비교해서 짝이 맞는 같은 형태의 객체가 있는지 찾아내는 기술을 말합니다. 이미지에서 객체를 찾는 방법은 이미지에서 의미 있는 특징들을 적절한 숫자로 변환하고 그 숫자들을 서로 비교해서 얼마나 비슷한지 판단하는 것입니다. 쉽게 말해 두 이미지 간 유사도를 측정하는 작업입니다. 특징을 대표할 수 있는 숫자를 특징 벡터 혹은 특징 디스크립터라고 합니다. 이미지 매칭은 큰 주제이므로 이에 대해서는 앞으로 계속 포스팅할 예정입니다. 우선 이번 포스팅에서는 두 이미지에서 비슷한 그림을 찾아내는 아주 간단한 방법에 대해 알아보겠습니다.
평균 해시 매칭(Average Hash Matching)
평균 해시 매칭은 이미지 매칭의 한 기법인데, 효과는 떨어지지만 구현이 아주 간단합니다. 평균 해시 매칭은 특징 벡터를 구하기 위해 평균값을 사용합니다. 우선, 두 이미지 사이에서 비슷한 그림을 찾기 전에 찾고자 하는 그림의 특징 벡터를 구하는 방법에 대해 알아보겠습니다.
- 이미지를 가로 세로 비율과 무관하게 특정한 크기로 축소합니다.
- 픽셀 전체의 평균값을 구해서 각 픽셀의 값이 평균보다 작으면 0, 크면 1로 바꿉니다.
- 0 또는 1로만 구성된 각 픽셀 값을 1행 1열로 변환합니다. (이는 한 개의 2진수 숫자로 볼 수 있습니다.)
이때 비교를 하고자 하는 두 이미지를 같은 크기로 축소해야 합니다. 그렇기 때문에 0과 1의 개수도 동일합니다. (2진수로 표현했을 때 비트 개수가 같다고 볼 수 있습니다.) 2진수가 너무 길어서 보기 불편하다면 필요에 따라 10진수나 16진수 등으로 변환해서 사용할 수 있습니다.
다음은 권총 이미지를 16 x 16 크기의 평균 해시로 변환하여 특징 벡터를 구하는 코드입니다.
# 권총을 평균 해시로 변환 (avg_hash.py)
import cv2
#영상 읽어서 그레이 스케일로 변환
img = cv2.imread('../img/pistol.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 8x8 크기로 축소 ---①
gray = cv2.resize(gray, (16,16))
# 영상의 평균값 구하기 ---②
avg = gray.mean()
# 평균값을 기준으로 0과 1로 변환 ---③
bin = 1 * (gray > avg)
print(bin)
# 2진수 문자열을 16진수 문자열로 변환 ---④
dhash = []
for row in bin.tolist():
s = ''.join([str(i) for i in row])
dhash.append('%02x'%(int(s,2)))
dhash = ''.join(dhash)
print(dhash)
cv2.namedWindow('pistol', cv2.WINDOW_GUI_NORMAL)
cv2.imshow('pistol', img)
cv2.waitKey(0)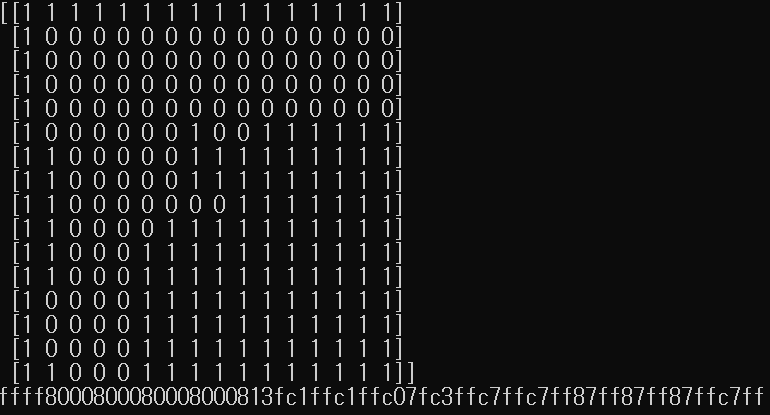

앞서 설명드린 프로세스에 따라서 우선 이미지를 16 x 16 사이즈로 조정합니다. 그런 다음 픽셀의 전체 평균값을 구하고 그 평균값보다 큰 픽셀은 1, 작은 픽셀은 0으로 바꿉니다. 그렇게 구한 결과가 0과 1로 구성된 배열입니다. 숫자 배열을 자세히 보시면 0으로 구성된 부분이 권총 모양을 닮았음을 알 수 있습니다. 권총은 검은색이므로 픽셀 값이 0에 가깝고, 배경은 픽셀 값이 255에 가깝습니다. 따라서 전체 픽셀의 평균값보다 작은 부분은 0, 큰 부분은 1로 바뀐 것입니다.
이제 이렇게 얻은 평균 해시를 다른 이미지의 것과 비교해서 얼마나 비슷한지를 알아내야 합니다. 비슷한 정도를 측정하는 방법에는 여러 가지가 있습니다. 그중 가장 대표적인 것이 유클리드 거리(Euclidian distance)와 해밍 거리(Hamming distance)입니다.
유클리드 거리는 두 값의 차이로 거리를 계산합니다. 예를 들어 5와 비교할 값으로 1과 7이 있다면 5와 1의 유클리드 거리는 5-1 = 4이고, 5와 7의 유클리드 거리는 7-5 = 2입니다. 유클리드 거리가 작을수록 두 수는 비슷한 수라고 판단하므로 5는 1보다는 7과 더 유사하다고 결론짓습니다.
해밍 거리는 두 값의 길이가 같아야 계산할 수 있습니다. 해밍 거리는 두 수의 같은 자리 값 중 서로 다른 것이 몇 개인지를 판단하여 유사도를 계산합니다. 예를 들어 12345와 비교할 값으로 12354와 92345가 있을 때 12345와 12354의 마지막 자리가 45와 54로 다르므로 해밍 거리는 2입니다. 반면 12345와 92345는 1과 9 한자리만 다르므로 해밍 거리는 1입니다. 따라서 12345는 12354보다 92345와 더 유사하다고 판단합니다.
앞서 구한 권총의 평균 해시를 다른 이미지와 비교할 때는 해밍 거리를 써야 합니다. 유클리드 거리는 자릿수가 높을수록 차이가 크게 벌어지지만 해밍 거리는 몇 개의 숫자가 다른가만을 고려하기 때문입니다. 이미지를 비교하는데 평균 해시 숫자의 크기가 중요하기보다는 얼마나 유사한 자릿수가 많은지가 더 중요합니다.
이제 권총 이미지의 평균 해시를 다른 이미지의 평균 해시와 해밍 거리로 비교해 유사도를 측정해보겠습니다. 우선 여러 이미지가 필요한데 아래 링크를 통해 다운로드할 수 있습니다.
https://drive.google.com/file/d/137RyRjvTBkBiIfeYBNZBtViDHQ6_Ewsp/view
다운로드한 파일을 압축 해제하여 img 디렉터리 안의 101_ObjectCategories라는 디렉터리에 저장하시기 바랍니다. 1만 장 가까운 사진들이 있는데 이 사진들과 앞서 다룬 권총 이미지를 비교하여 권총과 유사한 이미지를 찾아내는 예제입니다. 아래 코드는 권총의 평균 해시와 비교하여 해밍 거리가 25% 이내인 이미지를 출력합니다.
# 사물 이미지 중에서 권총 이미지 찾기 (avg_hash_matching.py)
import cv2
import numpy as np
import glob
# 영상 읽기 및 표시
img = cv2.imread('../img/pistol.jpg')
cv2.imshow('query', img)
# 비교할 영상들이 있는 경로 ---①
search_dir = '../img/101_ObjectCategories'
# 이미지를 16x16 크기의 평균 해쉬로 변환 ---②
def img2hash(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.resize(gray, (16, 16))
avg = gray.mean()
bi = 1 * (gray > avg)
return bi
# 해밍거리 측정 함수 ---③
def hamming_distance(a, b):
a = a.reshape(1,-1)
b = b.reshape(1,-1)
# 같은 자리의 값이 서로 다른 것들의 합
distance = (a !=b).sum()
return distance
# 권총 영상의 해쉬 구하기 ---④
query_hash = img2hash(img)
# 이미지 데이타 셋 디렉토리의 모든 영상 파일 경로 ---⑤
img_path = glob.glob(search_dir+'/**/*.jpg')
for path in img_path:
# 데이타 셋 영상 한개 읽어서 표시 ---⑥
img = cv2.imread(path)
cv2.imshow('searching...', img)
cv2.waitKey(5)
# 데이타 셋 영상 한개의 해시 ---⑦
a_hash = img2hash(img)
# 해밍 거리 산출 ---⑧
dst = hamming_distance(query_hash, a_hash)
if dst/256 < 0.25: # 해밍거리 25% 이내만 출력 ---⑨
print(path, dst/256)
cv2.imshow(path, img)
cv2.destroyWindow('searching...')
cv2.waitKey(0)
cv2.destroyAllWindows()
찾아낸 이미지가 대부분 권총이나 망원경과 사람의 얼굴처럼 틀린 이미지도 있습니다. 찾아낸 망원경이나 사람 얼굴을 보면 권총과 유사하게 되어 있는 부분이 있습니다. 사람의 얼굴에서는 머리 부분이 마치 권총 같아 보이기 때문에 결과로 출력된 것을 볼 수 있습니다.
템플릿 매칭 (Template Matching)
템플릿 매칭은 특정 물체에 대한 이미지를 준비해 두고 그 물체가 포함되어 있을 것이라고 예상할 수 있는 이미지와 비교하여 매칭 되는 위치를 찾는 것입니다. 이때 미리 준비한 이미지를 템플릿 이미지라고 합니다. 템플릿 이미지는 비교할 이미지보다 크기가 항상 작아야 합니다. 템플릿 매칭과 관련한 함수는 다음과 같습니다.
- result = cv2.matchTemplate(img, templ, method, result, mask)
img: 입력 이미지
templ: 템플릿 이미지
method: 매칭 메서드 (cv2.TM_SQDIFF: 제곱 차이 매칭, 완벽 매칭:0, 나쁜 매칭: 큰 값 / cv2.TM_SQDIFF_NORMED: 제곱 차이 매칭의 정규화 / cv2.TM_CCORR: 상관관계 매칭, 완벽 매칭: 큰 값, 나쁜 매칭: 0 / cv2.TM_CCORR_NORMED: 상관관계 매칭의 정규화 / cv2.TM_CCOEFF: 상관계수 매칭, 완벽 매칭:1, 나쁜 매칭: -1 / cv2.TM_CCOEFF_NORMED: 상관계수 매칭의 정규화)
result(optional): 매칭 결과, (W - w + 1) x (H - h + 1) 크기의 2차원 배열 [여기서 W, H는 입력 이미지의 너비와 높이, w, h는 템플릿 이미지의 너비와 높이]
mask(optional): TM_SQDIFF, TM_CCORR_NORMED인 경우 사용할 마스크 - minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(src, mask)
src: 입력 1 채널 배열
minVal, maxVal: 배열 전체에서의 최소 값, 최대 값
minLoc, maxLoc: 최소 값과 최대 값의 좌표 (x, y)
cv2.matchTemplate() 함수는 입력 이미지(img)에서 템플릿 이미지(templ)를 슬라이딩하면서 주어진 메서드에 따라 매칭을 수행합니다. cv2.matchTemplate() 함수의 반환 값은 (W - w + 1) x (H - h + 1) 크기의 2차원 배열입니다. (여기서 W, H는 입력 이미지의 너비와 높이, w, h는 템플릿 이미지의 너비와 높이입니다.) 이 배열의 최솟값 혹은 최댓값을 구하면 원하는 최선의 매칭값과 매칭점을 구할 수 있습니다. 이것을 손쉽게 해주는 함수가 바로 cv2.minMaxLoc()입니다. 이 함수는 입력 배열에서의 최솟값, 최댓값뿐만 아니라 최솟값, 최댓값의 좌표도 반환합니다.
아래는 로봇 태권 V를 다른 이미지 내에서 템플릿 매칭 방식으로 찾는 예시 코드입니다.
# 템플릿 매칭으로 객체 위치 검출 (template_matching.py)
import cv2
import numpy as np
# 입력이미지와 템플릿 이미지 읽기
img = cv2.imread('../img/figures.jpg')
template = cv2.imread('../img/taekwonv1.jpg')
th, tw = template.shape[:2]
cv2.imshow('template', template)
# 3가지 매칭 메서드 순회
methods = ['cv2.TM_CCOEFF_NORMED', 'cv2.TM_CCORR_NORMED', \
'cv2.TM_SQDIFF_NORMED']
for i, method_name in enumerate(methods):
img_draw = img.copy()
method = eval(method_name)
# 템플릿 매칭 ---①
res = cv2.matchTemplate(img, template, method)
# 최솟값, 최댓값과 그 좌표 구하기 ---②
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
print(method_name, min_val, max_val, min_loc, max_loc)
# TM_SQDIFF의 경우 최솟값이 좋은 매칭, 나머지는 그 반대 ---③
if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
top_left = min_loc
match_val = min_val
else:
top_left = max_loc
match_val = max_val
# 매칭 좌표 구해서 사각형 표시 ---④
bottom_right = (top_left[0] + tw, top_left[1] + th)
cv2.rectangle(img_draw, top_left, bottom_right, (0,0,255),2)
# 매칭 포인트 표시 ---⑤
cv2.putText(img_draw, str(match_val), top_left, \
cv2.FONT_HERSHEY_PLAIN, 2,(0,255,0), 1, cv2.LINE_AA)
cv2.imshow(method_name, img_draw)
cv2.waitKey(0)
cv2.destroyAllWindows()
세 가지 매칭 메서드를 활용해서 템플릿 매칭을 수행했습니다. 태권 V의 위치를 잘 찾아낸 것을 볼 수 있습니다. 다만 템플릿 매칭은 크기, 방향, 회전 변환에는 잘 작동하지 않고, 속도가 느리다는 단점이 있습니다.
'OpenCV' 카테고리의 다른 글
| OpenCV - 27. 특징 디스크립터 검출기 (SIFT, SURF, ORB) (2) | 2020.11.09 |
|---|---|
| OpenCV - 26. 이미지의 특징점(Keypoints)과 특징점 검출기(Keypoints detector) (0) | 2020.11.04 |
| OpenCV - 24. 연속 영역 분할 (거리 변환, 레이블링, 색 채우기, 워터셰드, 그랩컷, 평균 이동 필터) (0) | 2020.10.25 |
| OpenCV - 23. 허프 변환(Hough Transformation) (0) | 2020.10.24 |
| OpenCV - 22. 컨투어(Contour) (7) | 2020.10.20 |



